[ 회로도 ]
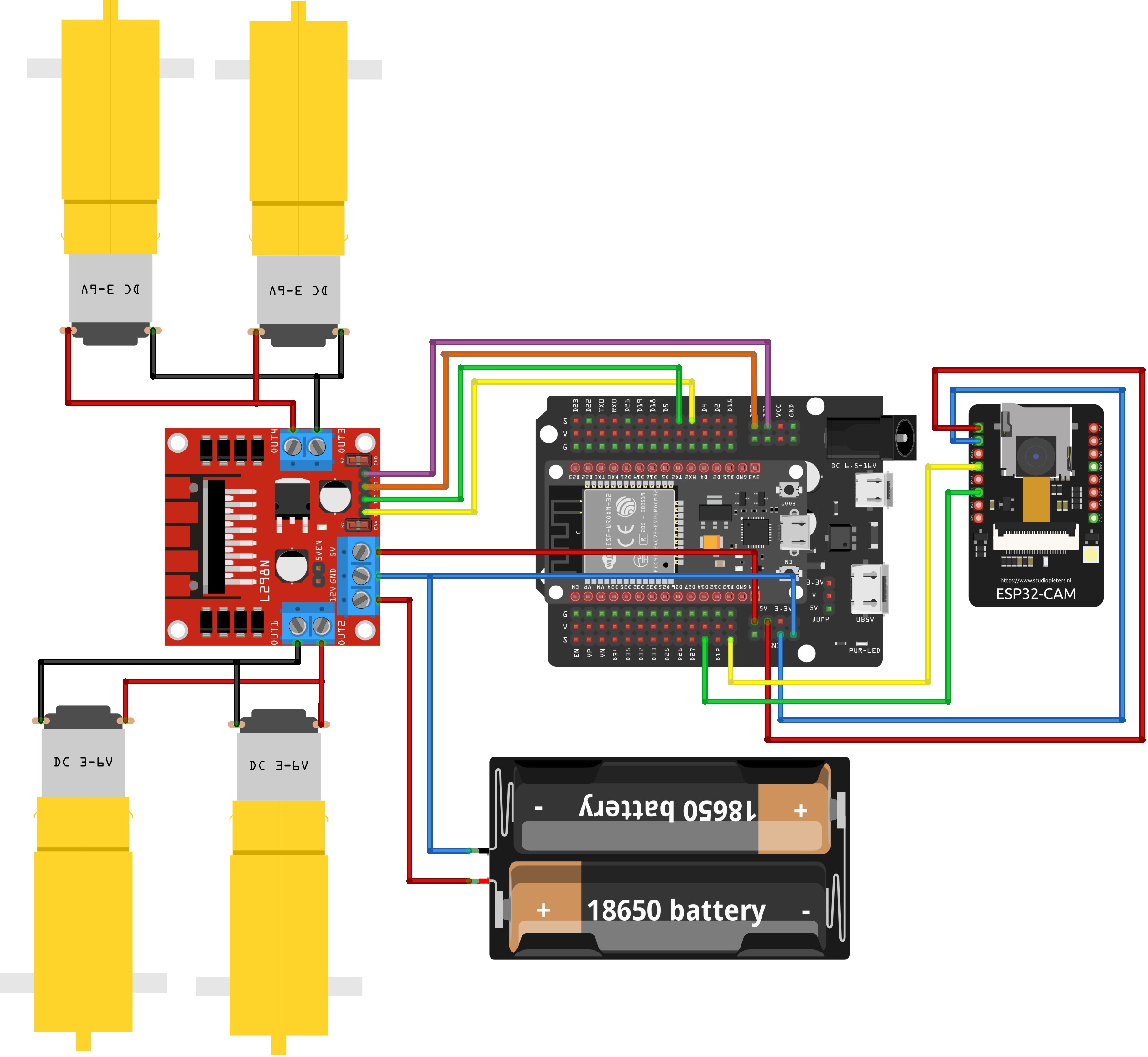
[ 배선 연결표 ]
1. ESP32 연결
| ESP32 핀 | 연결 대상 | 대상의 핀 | 역할 및 설명 |
|---|---|---|---|
| GPIO 13 / 14 | ESP32-CAM | GPIO 13 / 14 | 시리얼 통신 송수신 |
| GPIO 16 / 17 | L298N | IN 1 / 2 | 오른쪽 바퀴 전후진 |
| GPIO 21 / 22 | L298N | IN 3 / 4 | 왼쪽 바퀴 전후진 |
| +5V / GND | 공통 | 5V / GND | 전원 및 기준 전압 |
2. L298N 및 배터리 연결
| L298N 단자 | 연결 대상 | 설명 |
|---|---|---|
| 12V 입력 / GND | 배터리 (+/-) | 모터 구동 주 전원 |
| +5V 출력 | ESP32 +5V | 제어 보드 전원 공급 |
| OUT 1~4 | 모터들 | 바퀴 구동 출력 |